This product has been discontinued, please contact your local sales office for more information.
Unit of Measure
Return Policy |
- This product cannot be cancelled or returned once the order has been processed. |
Motor Type |
- Brushless DC Motor |
Motor Frame Size |
- 4.09 in.104 mm |
Output Power |
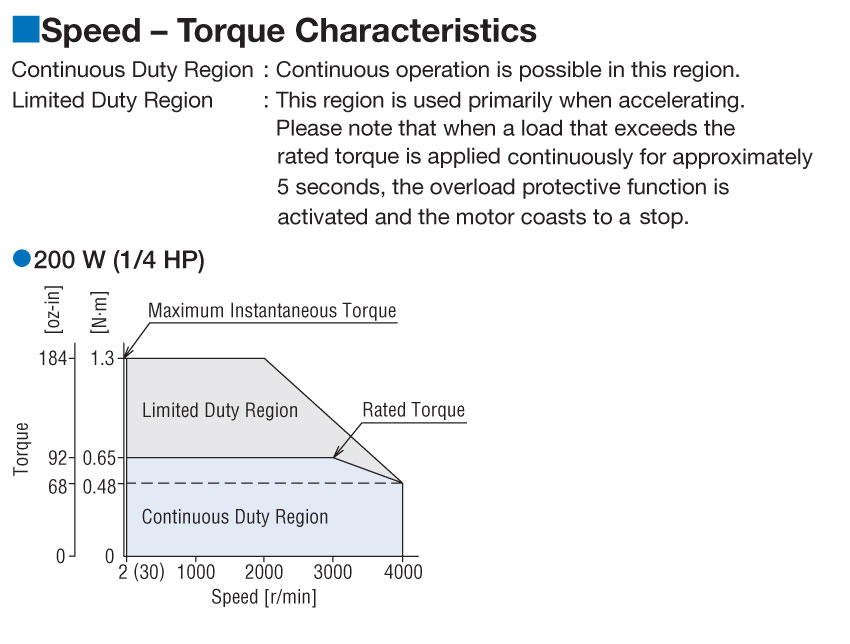
- 200 W (1/4 HP) |
Power Supply |
- Single-Phase 100-120 VAC |
Frequency |
- 50 Hz60 Hz |
Rated Input Current |
- 4.7 A |
Shaft/Gear Type |
- Parallel Shaft Gearhead |
Gear Ratio (X:1) |
- 20 :1 |
Output Shaft Diameter |
- 22 mm |
Rated Torque |
- 103 lb-in11.70 N·m |
Electromagnetic Brake |
- Not Equipped |
Variable Speed Range (r/min) |
-
Digital setting: 0.1 ~ 200 r/min (2000:1) Analog setting: 1.5 ~ 200 r/min (133:1) |
Permissible Load Inertia |
- 9300 oz-in²*When instantaneous stop or instantaneous bi-directional operation is performed = 4400 oz-in²1700 x 10-4 kg·m²*When instantaneous stop or instantaneous bi-directional operation is performed = 800 x 10-4 kg·m² |
Permissible Overhung Load |
-
0.39 in. from Shaft End = 123 0.79 in. from Shaft End = 180 lb10 mm from Shaft End = 550 20 mm from Shaft End = 800 N |
Permissible Thrust Load |
- 45 lb200 N |
Max. Extension Length (m) |
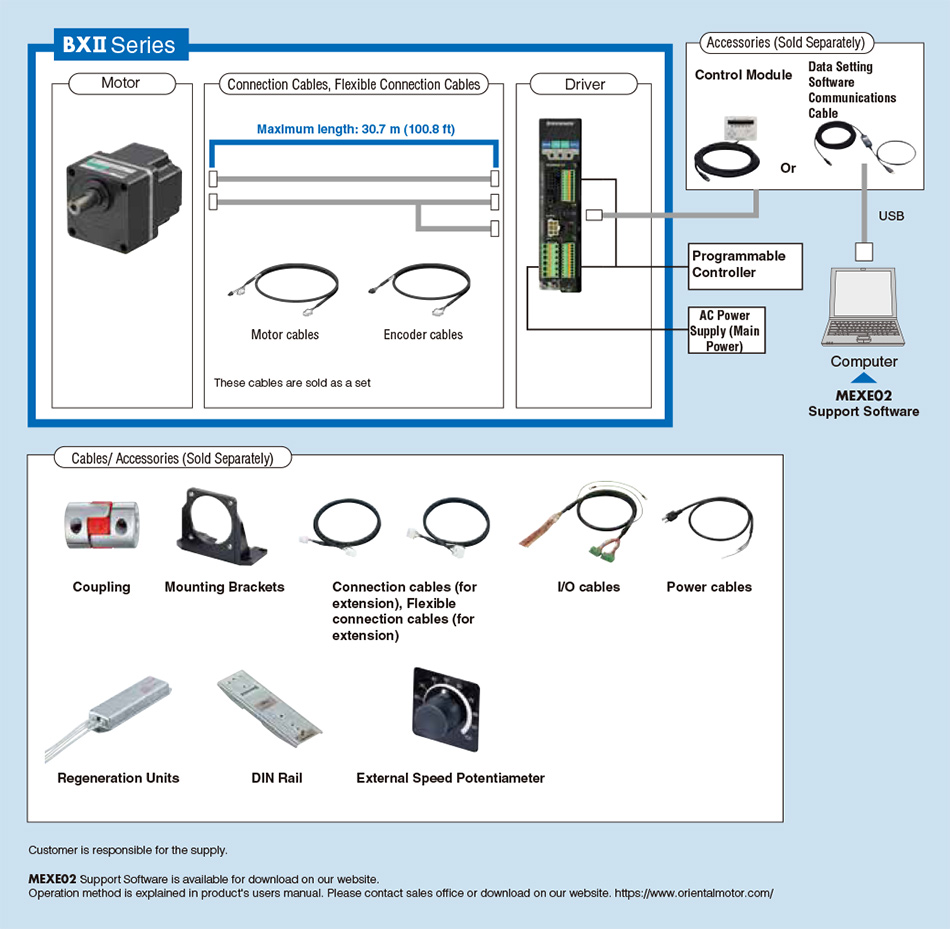
- Motor and driver distance: 99.7 ft. (30.4 m) |
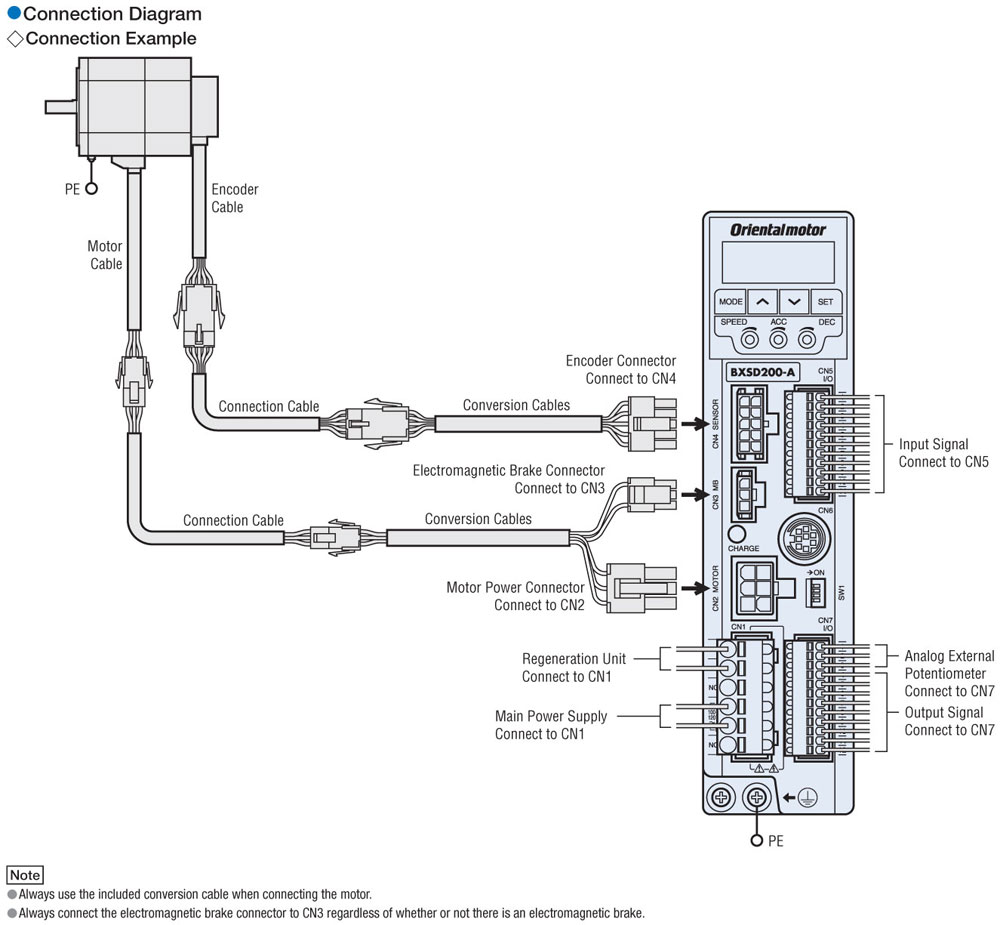
Components |
- BXM6200-GFS [Motor] BXSD200-A [Driver] GFS6G20 [Gearhead] |
RoHS Compliant |
- These products do not contain substances that exceed the regulation values in the RoHS Directive. |
Safety Standards |
- UL CSA CE |
CE Marking |
- Low Voltage Directives EMC Directives |
Insulation Resistance (Motor) |
- 100 MΩ or more when 500 VDC megger is applied between the windings and the case after continuous operation under normal ambient temperature and humidity (except for encoder). |
Insulation Resistance (Driver) |
- 100 M Ω or more when 500 VDC megger is applied between the power supply input terminal and the case, and between the power supply input terminal and the I/O terminal after continuous operation under normal ambient temperature and humidity. |
Dielectric Strength (Motor) |
- Sufficient to withstand 1.5 kVAC at 50 Hz applied between the windings and the case for 1 minute after continuous operation under normal ambient temperature and humidity (except for encoder). |
Dielectric Strength (Driver) |
- Sufficient to withstand 1.5 kVAC, 50 Hz applied between case and power supply input for 1 min. and 1.5 kVAC, 50 Hz applied between power supply input and the I/O terminal for 1 min. after continuous operation under normal ambient temperature and humidity. |
Temperature Rise (Motor) |
- Temperature rise of the windings is 50ºC (90ºF) max. and that of the case surface is 40ºC (72ºF) max, measured by the thermocouple method after rated continuous operation under normal ambient temperature and humidity. |
Temperature Rise (Driver) |
- Temperature rise of the heat sink is 50ºC (90ºF) max. measured by the thermocouple method after rated continuous operation under normal ambient temperature and humidity. [60ºC (108ºF) max. when drivers are installed in contact with each |
Ambient Temperature Range |
-
[Motor] 32ºF ~ 122ºF (0ºC ~ 50ºC), nonfreezing [Driver] 32ºF ~ 72ºF (0ºC ~ 40ºC) when drivers are installed in contact with each other |
Ambient Humidity |
- 85% max. (non-condensing) |
Operating Atmosphere |
- No corrosive gases or dust. Cannot be used in a radioactive area, magnetic field, vacuum, or other special environments. |
Altitude |
- Max of 10000 ft. (3000 m) above sea level |
Insulation Class |
- UL/CSA Standards: 105 (A), EN Standards: 120 (E) |
Degree of Protection |
-
IP54 (excluding connectors) [Motor] IP20 [Driver] |
|
|
- Speed Control Mode |
Speed Control Method (Select one of the following) |
-
Digital Setting:
|
Acceleration/Deceleration Time |
-
Digital Setting: 0.000 ~ 30.00 s (rated speed, no load) Analog Setting: 0.1 ~ 30 s (rated speed, no load) |
Acceleration/Deceleration Time Setting Method |
-
Digital Setting: Select one of the following methods: (Individual settings)
|
Operation Data Setting Number |
- 16 Points |
Operation During Motor Standstill |
-
Operations can be selected when the motor is at standstill
|
Other Operations |
- JOG operation, test operation, teaching (excluding MEXE02) |
|
|
- Position Control Mode |
Travel Amount Setting Range |
- -8,388,608 ~ +8,388,607 step |
Resolution |
- 0.72º (500 steps/rotation) |
Operating Modes |
- Incremental or absolute |
Operation Functions |
- Independent, linked, linked 2, sequential, direct |
Positioning Accel/Decel Time |
- 0.000 ~ 30.00 s (rated speed, no load) |
Positioning Operations |
- Continous operation, JOG operation, return-to-home operation, test operation, teaching |
|
|
- Torque Control Mode |
Torque Limit Control |
- The motor's output torque can be limited in speed control mode and position control mode. |
Torque Limiting Setting Range |
- 0 ~ 250% |
Torque Limiting Setting Methods |
-
Digital Setting: Select one of the following methods:
|
|
|
|
|


|
|
|
|
©2024 - ORIENTAL MOTOR USA CORP. - All Rights Reserved