| Available to Ship1 | - Contact your local sales office for product lead-times, available to ship dates and shipping methods. |
Return Policy |
- This product cannot be cancelled or returned once the order has been processed. |
Motor Type |
- 2-Phase |
Frame Size |
- 1.65 in42 mm |
Motor Length |
- 1.54 in.39 mm |
Speed-Torque Characteristics |
-
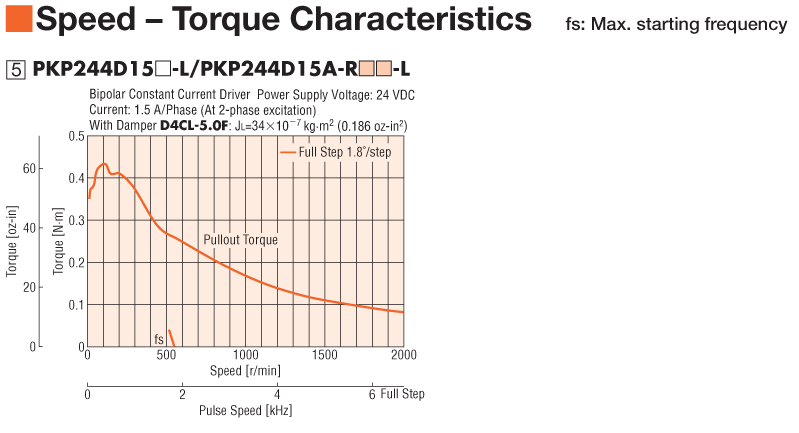 Speed - Torque Characteristics |
Holding Torque |
- 68 oz-in0.48 N·m |
Shaft/Gear Type |
- Round Shaft with Flat (No Gearhead) |
Shaft |
- Single |
Type |
- Standard |
Encoder |
- Equipped |
Basic Step Angle |
- 1.8º |
Motor Connection Type |
- Connector |
Connection Type |
- Bipolar |
Current per Phase (A/phase) |
- 1.50 |
Lead Wires |
- 4 |
Voltage (VDC) |
- 3.90 |
Resistance (Ω/phase) |
- 2.60 |
Inductance (mH/phase) |
- 4.90 |
Rotor Inertia |
- 0.31 oz-in²57x10-7 kg·m² |
RoHS Compliant |
- Yes |
Insulation Resistance |
- 100 MΩ or more when 500 VDC megger is applied between the windings and the case under normal ambient temperature and humidity. |
Dielectric Strength |
- Sufficient to withstand 0.5 kVAC at 50 Hz or 60 Hz applied between the windings and the case for 1 minute under normal ambient temperature and humidity. |
Temperature Rise |
- Temperature rise of the windings is 144ºF (80ºC) or less measured by the change resistance method. (at rated current, at standstill, 2 phases energized) |
Insulation Class |
- Class B [266ºF (130ºC)] |
Ambient Temperature Range |
- 14 ~ 122ºF (-10 ~ 50ºC) (non-freezing) |
Ambient Humidity |
- 85% or less (Non-Condensing) |
Shaft Runout |
- 0.05 mm (0.002 in.) T.I.R. |
Concentricity |
- 0.075 mm (0.003 in.) T.I.R. |
Perpendicularity |
- 0.075 mm (0.003 in.) T.I.R. |
Radial Play |
- 0.025 mm (0.001 in.) maximum of 5 N (1.12 lb.) |
Axial Play |
- 0.075 mm (0.003 in.) maximum of 10 N (2.2 lb.) |
Step Accuracy |
- ±3 arc minutes (±0.05º) |
Permissible Overhung Load |
- 0 in. from Shaft End = 4.5 lb0.2 in. from Shaft End = 5.6 lb0.39 in. from Shaft End = 7.6 lb0.59 in. from Shaft End = 11.7 lb0 mm from Shaft End = 20 N5 mm from Shaft End = 25 N10 mm from Shaft End = 34 N15 mm from Shaft End = 52 N |
Permissible Thrust Load |
- The permissible thrust load shall be no greater than the motor mass. |