| Lead Time1 | - {Contact your local sales office for more information.} |
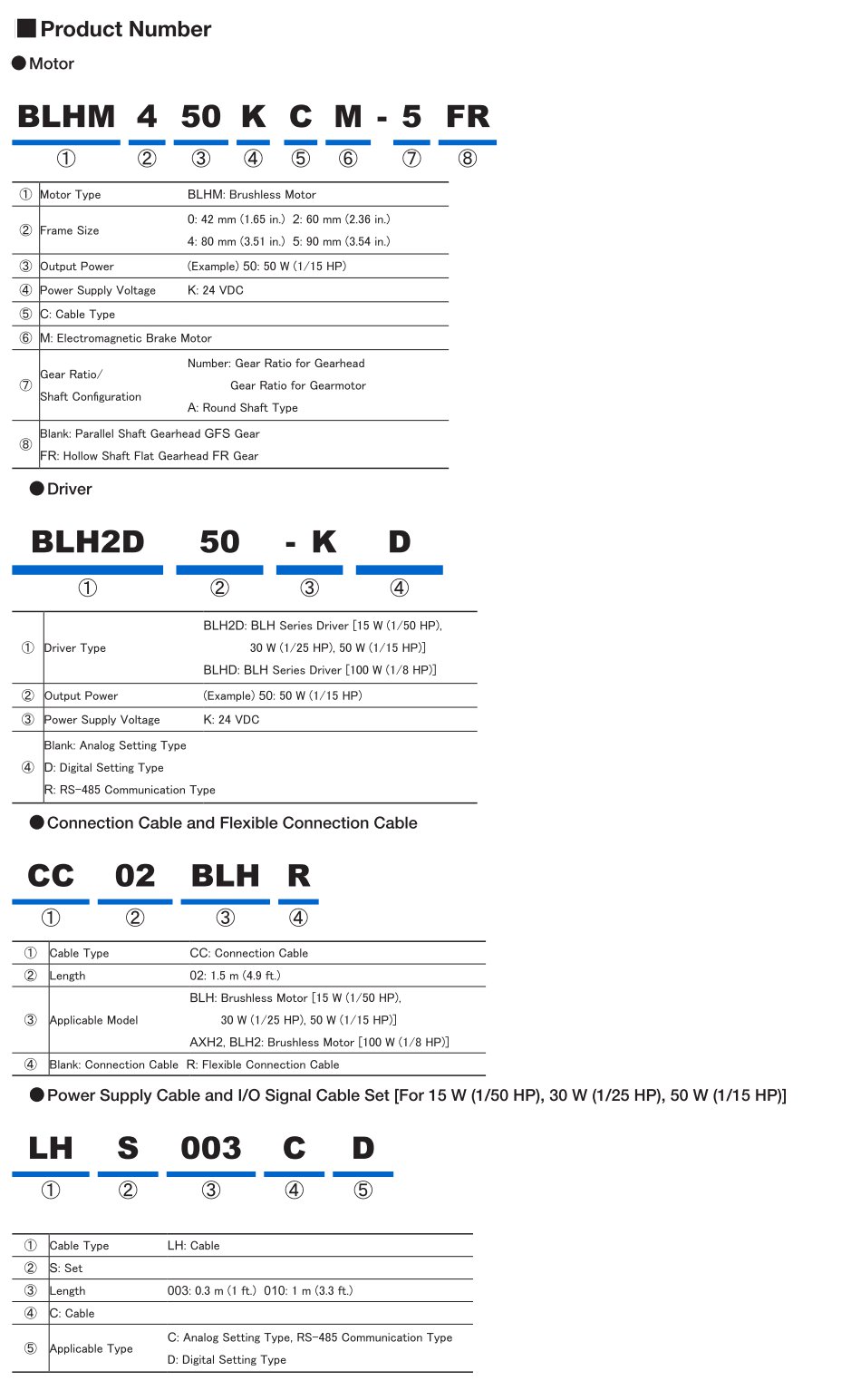
Motor Type |
- Brushless DC Motor |
Motor Frame Size |
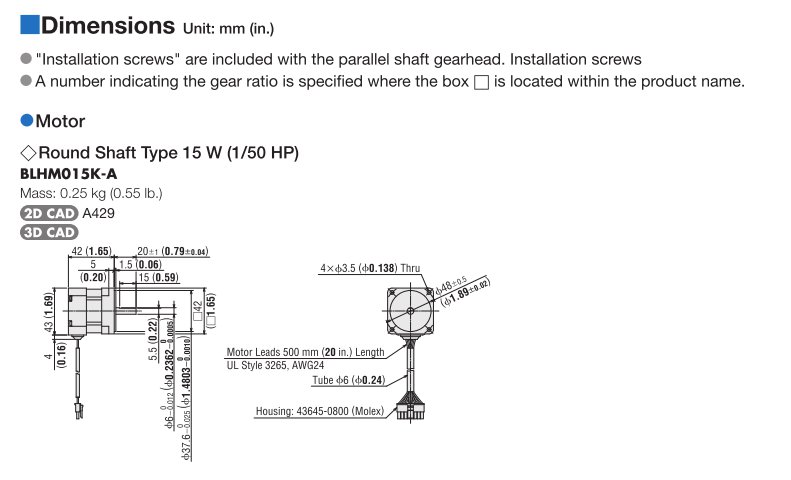
- 1.65 in.42 mm |
Output Power |
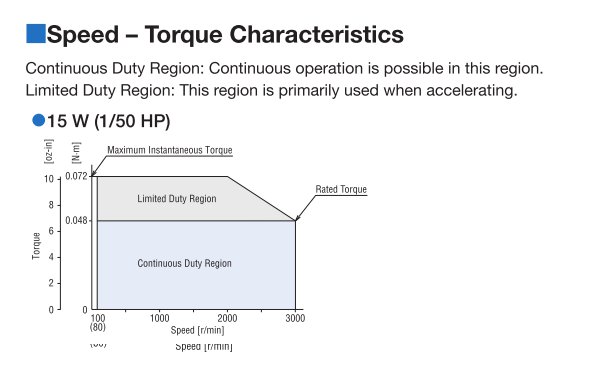
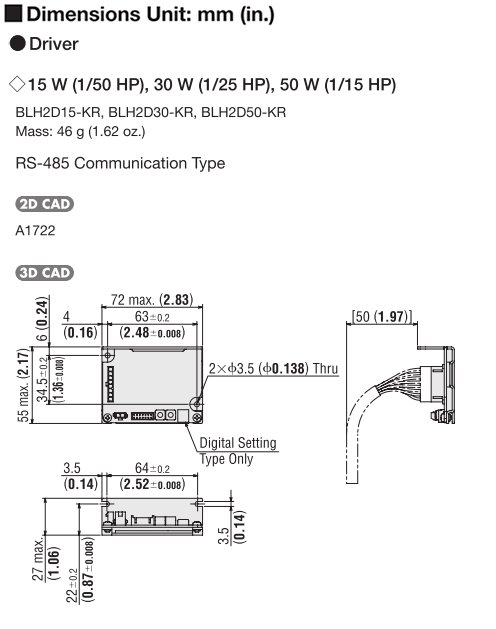
- 15 W (1/50 HP) |
Power Supply |
- 24 VDC |
Driver Type |
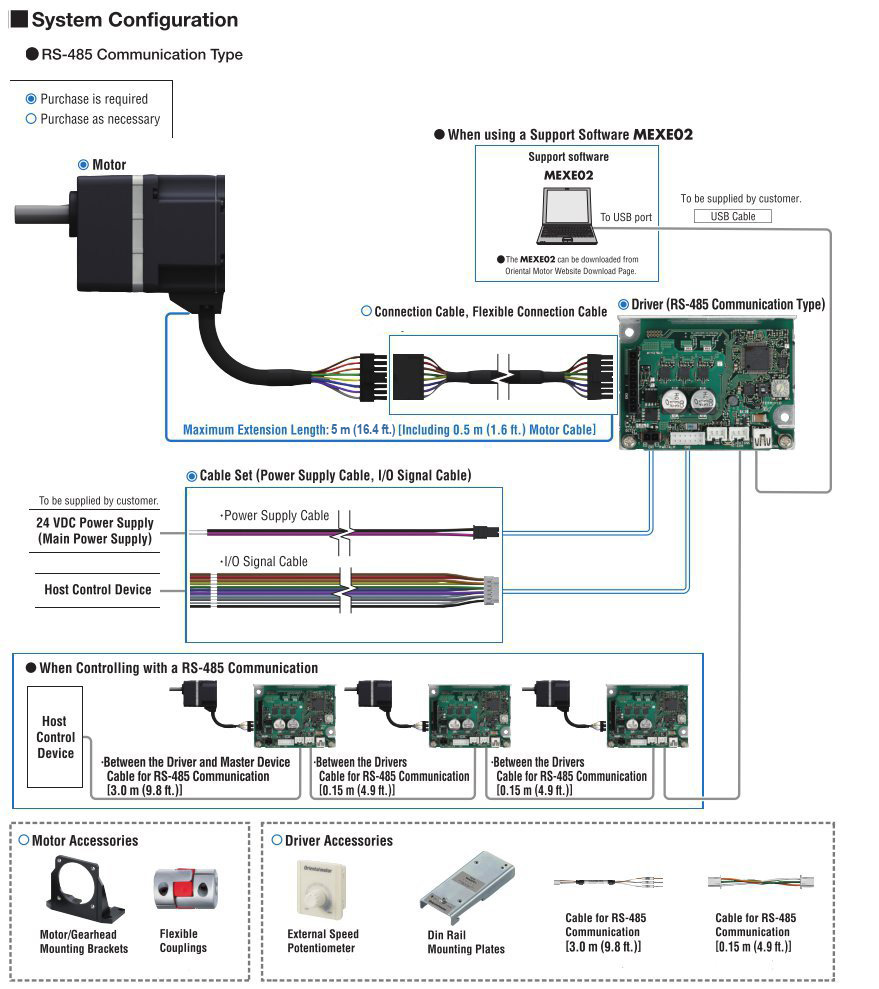
- RS-485 Communications Type |
Type |
- Lead Wire |
Shaft/Gear Type |
- Round Shaft (No Gearhead) |
Output Shaft Diameter |
- 6 mm |
Degree of Protection (Motor) |
- IP40 |
Rated Torque |
- 0.425 lb-in0.048 N·m |
Variable Speed Range (r/min) |
- 80 ~ 3000 |
Permissible Load Inertia |
- 2.70 oz-in²0.5 x 10-4 kg·m² |
Permissible Overhung Load |
- 0.39 in. from Shaft End = 11.2 lb10 mm from Shaft End = 50 N |
Permissible Thrust Load |
- The permissible thrust load should not be greater than half the motor mass. |
Power Input |
- DC |
Position Control Mode |
- No |
Torque Limit Control |
- Yes |
Vertical Drive (Gravitational Operation) |
- No |
Max. Extension Length (m) |
- 5 |
Components |
-
BLH2D15-KR, Brushless DC Motor RS-485 Communication Driver (24 VDC) ($176.00) BLHM015K-A, 15 W (1/50 HP) Brushless DC Motor ($174.00) |
RoHS Compliant |
- Yes |
Safety Standards |
- UL CSA CE |
CE Marking |
- EMC Directives |
California Proposition 65 |
-
⚠ CA WARNING Cancer risk from exposure to Nickel. See www.P65Warnings.ca.gov Risk of reproductive harm from exposure to Di-n-hexyl phthalate (DnHP). See www.P65Warnings.ca.gov Risk of cancer and reproductive harm from exposure to Di(2-ethylhexyl phthalate (DEHP). See www.P65Warnings.ca.gov See "?" or copy/paste www.P65Warnings.ca.gov in your browser. |
Insulation Class |
- UL, CSA: Class A [105ºC (221ºF)] EN: Class E [120ºC (248ºF)] |
Insulation Resistance (Motor) |
- 100 MΩ or more when 500 VDC megger is applied between the windings and the frame after continuous operation under normal ambient temperature and humidity. |
Insulation Resistance (Driver) |
- 100 M Ω or more when 500 VDC megger is applied between the power supply terminal and heat radiation plate after continuous operation under normal ambient temperature and humidity. |
Dielectric Strength (Motor) |
- Sufficient to withstand 0.5 kVAC at 50Hz applied between the windings and the frame for 1 minute after continuous operation under normal ambient temperature and humidity. |
Dielectric Strength (Driver) |
- Sufficient to withstand 0.5 kVAC at 50Hz applied between the power supply terminal and the heat radiation plate for 1 minute after continuous operation under normal ambient temperature and humidity. |
Ambient Temperature Range |
- 0ºC ~ +50ºC (+32ºF ~ +122ºF) (nonfreezing) |
Ambient Humidity |
- 85% max. (noncondensing) |
Operating Atmosphere |
- No corrosive gases or dust. Cannot be used in radioactive area, magnetic field, vacuum or other special environment. |
Degree of Protection |
- [Motor] IP40 [Driver] IP00 |
Speed Control Method (Select one of the following) |
- RS-485 Communications PWM Signal Digital (MEXE02 support software) External DC voltage External potentiometer (20kΩ, 1/4W) |
Number of Speed Settings |
- Operating data for up to 8 speeds can be set. (When using digital setting, i.e. MEXE02 support software) |
Multi-Speed Setting Method |
-
Digital (MEXE02 support software) External analog setting device (external speed potentiometer or external DC voltage) RS-485 Communications PWM input |
Acceleration/Deceleration Time |
-
0.1 to 15.0 (Factory setting: 0.5 s) Digital (MEXE02 support software) RS-485 Communications PWM Signal |
Torque Limiting |
-
0 to 200% (Factory setting: 200%) Digital (MEXE02 support software) External analog setting device (external speed potentiometer or external DC voltage) RS-485 Communications PWM Signal |
Instantaneous Stop |
- Yes |
Multi-Axes Control |
- Yes |
Alarm Output |
- Yes |
I/O Functions |
-
Direct Input Method: C-MOS Negative Logic Input Point: 5 Points Initial Assignment: START/STOP, RUN/BRAKE, FWD/REV, M0, ALMREST Direct Output Method: Transistor and open-collector output Point: 2 Points Initial Assignment: SPEED-OUT, ALM-B |
Electrical Characteristics |
-
EIA-485 Based Use a shielded twisted pair cable and keep the total wiring distance including extension to 10 m (32.8 ft.) or less. |
Communication Method |
-
Half duplex, Asynchronous communication (data: 8 bits, stop bit: 1 bit or 2 bits, parity: none, even, or odd) |
Transmission Rate |
- Select either from 9600 bps, 19200 bps, 38400 bps, 57600 bps, 115200 bps, 230400 bps |
Protocol |
- Modbus RTU mode |
Number of Connectable Units |
- Up to 15 drivers can be connected to a single programmable controller (master device). |
|
|
|
|
|
|
|
|
- 1 Quoted Ship Date for orders placed before 12:00 pm PST. Quantities may affect Shipping Date.