![]()
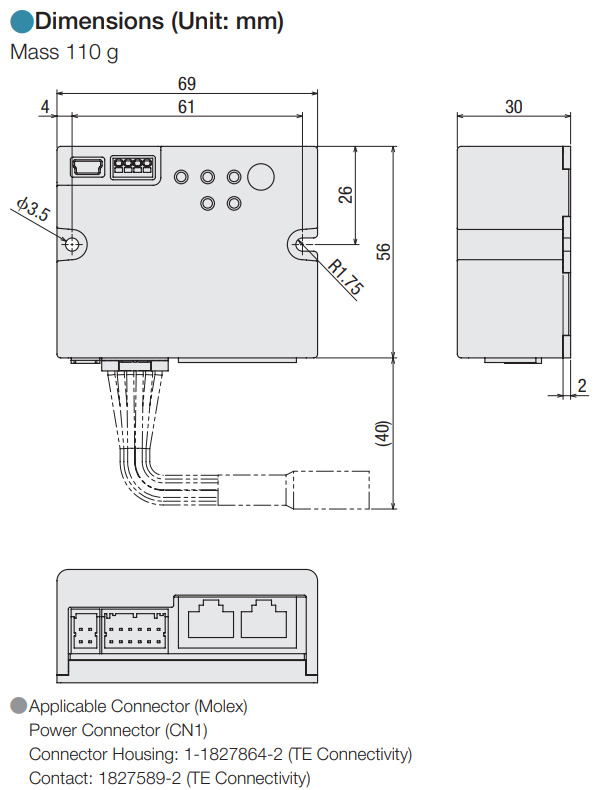
An AZ Series mini Driver compatible with general-purpose Ethernet protocols (Modbus TCP, UDP) can be directly controlled using programming languages, such as Python, from a single-board computer, such as Raspberry Pi or JETSON, or a personal computer.
- Built-in Protective Functions
- 24/48 VDC
- For use with AZ Series Motors

| Lead Time1 | - {Contact your local sales office for more information.} |
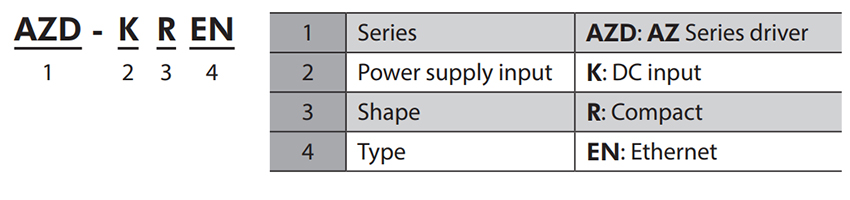
Driver Type |
- Ethernet Type |
Power Supply |
- 24 / 48 VDC |
Main Power Supply Input Current |
- 0.4 ~ 3.7A (Refer to manual for details) |
Number of Positioning Data Sets |
- 256 Points |
Input |
- 16 Points |
Output |
- 16 Points |
Control Power Supply Input Current |
-
0.15 A (standard motors) |
Safety Standards |
- UL CE |
California Proposition 65 |
-
⚠ CA WARNING Cancer risk from exposure to Nickel. See www.P65Warnings.ca.gov Risk of reproductive harm from exposure to Di-n-hexyl phthalate (DnHP). See www.P65Warnings.ca.gov Risk of cancer and reproductive harm from exposure to Di(2-ethylhexyl phthalate (DEHP). See www.P65Warnings.ca.gov See "?" or copy/paste www.P65Warnings.ca.gov in your browser. |
Electrical Characteristics |
- Use shielded twisted-pair (STP) cable. Straight-through/Crossover cable, Category 5e or higher |
Communication Method |
- Full Duplex (Autonegotiation) |
Protocol |
- Modbus TCP, Modbus UDP |
Baud Rate |
- 100 Mbps |
Connection Type |
- Unlimited units can be connected to a single host system (depends on Ethernet limitations) |
|
|
|
|

|
|
- 1 Quoted Ship Date for orders placed before 12:00 pm PST. Quantities may affect Shipping Date.