Return Policy |
- This product cannot be cancelled or returned once the order has been processed. |
Frame Size |
- 2.36 in60 mm |
Motor Length |
- 4.09 in.104 mm |
Speed-Torque Characteristics |
-
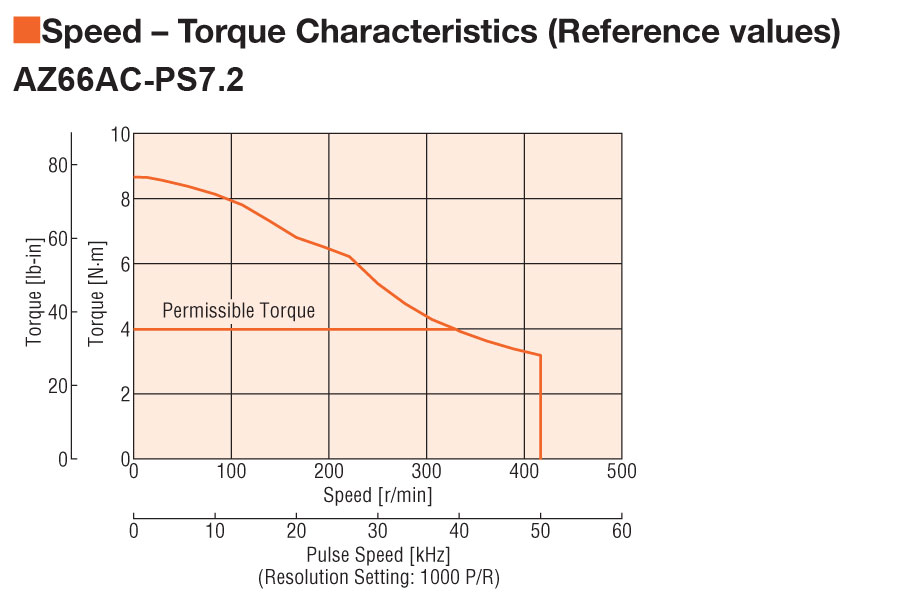 Speed - Torque Characteristics |
Holding Torque |
- 566 oz-in4 N·m |
Type |
- Absolute Sensor Type |
Shaft/Gear Type |
- Planetary Gear |
Gear Ratio (X:1) |
- 7.2 :1 |
Backlash |
- 25 arcmin (0.72º) |
Feedback Device (Motor) |
- Absolute Mechanical Sensor |
Shaft |
- Single |
Electromagnetic Brake |
- Not Equipped |
Power Supply |
- Single-Phase/Three-Phase 200-240 VAC |
Current |
- 1.4 A [Three-Phase] 2.3 A [Single-Phase] |
Resolution (Resolution Setting: 1000 P/R) |
- 0.05 °/Pulse |
Permissible Speed Range (r/min) |
- 0 ~ 416 |
Rotor Inertia |
- 2 oz-in²370x10-7 kg·m² |
Control Power Supply |
- 24 VDC ± 5%, 0.25 A |
RoHS Compliant |
- These products do not contain substances that exceed the regulation values in the RoHS Directive. |
Safety Standards |
- UL CE |
CE Marking |
- Low Voltage Directives EMC Directives |
California Proposition 65 |
-
⚠ CA WARNING Cancer risk from exposure to Nickel. See www.P65Warnings.ca.gov Risk of reproductive harm from exposure to Di-n-hexyl phthalate (DnHP). See www.P65Warnings.ca.gov Risk of cancer and reproductive harm from exposure to Di(2-ethylhexyl phthalate (DEHP). See www.P65Warnings.ca.gov See "?" or copy/paste www.P65Warnings.ca.gov in your browser. |
Power Removal Function |
- Emergency Torque Off (ETO) Function |
Components |
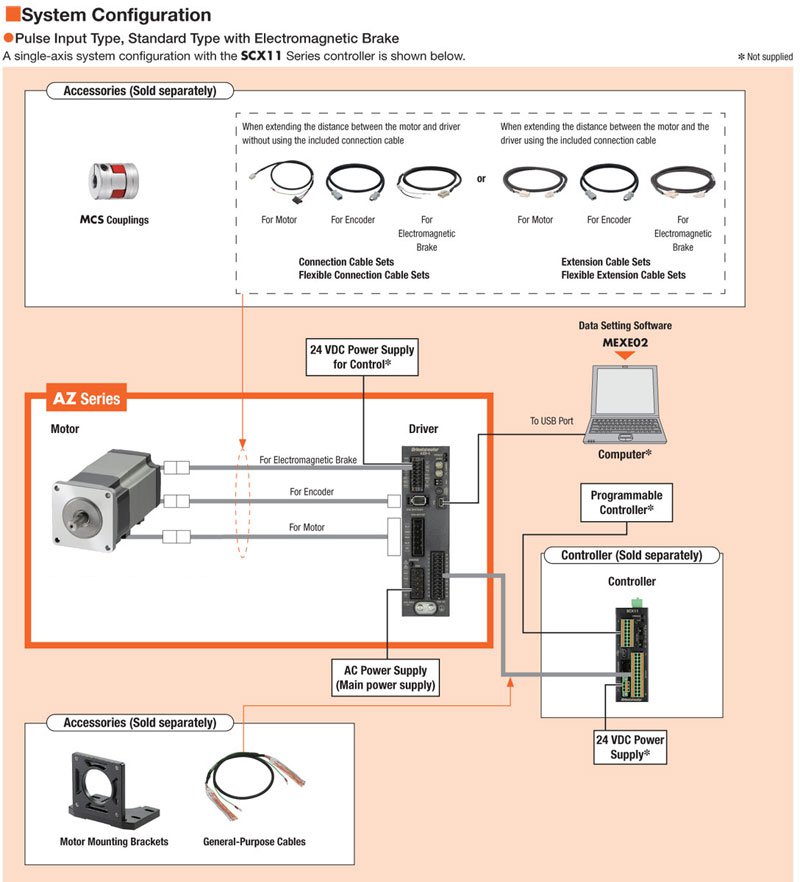
- AZD-C [Driver] AZM66AC-PS7.2 [Motor] |
Degree of Protection |
-
[Motor] IP66 (excluding the mounting surface and connector) [Driver] IP20 |
Stop Position Accuracy |
- ±5 arc minutes (±0.084º) |
Shaft Runout |
- 0.05 mm (0.002 in.) T.I.R. |
Concentricity |
- 0.075 mm (0.003 in.) T.I.R. |
Perpendicularity |
- 0.075 mm (0.003 in.) T.I.R. |
Radial Load |
- 0 in. from Shaft End = 56 lb0.2 in. from Shaft End = 60 lb0.39 in. from Shaft End = 67 lb0.59 in. from Shaft End = 76 lb0.79 in. from Shaft End = 87 lb0 mm from Shaft End = 250 N5 mm from Shaft End = 270 N10 mm from Shaft End = 300 N15 mm from Shaft End = 340 N20 mm from Shaft End = 390 N |
Axial Load |
- 22 lb100 N |
Maximum Input Pulse Frequency |
-
Line driver output by programmable controller: 1 MHz (When pulse duty is 50%) Open-collector output by programmable controller: 250 kHz (When pulse duty is 50%) Negative Logic Pulse Input (Initial Value) |
Control Command |
- Pulse input |
Direct Input |
- Input Points: 6 Points |
Direct Output |
- Output Points: 6 Points |
|
|
|
|


|
|